1. 霍夫直线检测
作用:检测图片当中点集合中的直线。(比如提取图片中的直线:车道线)
先来看下原理图: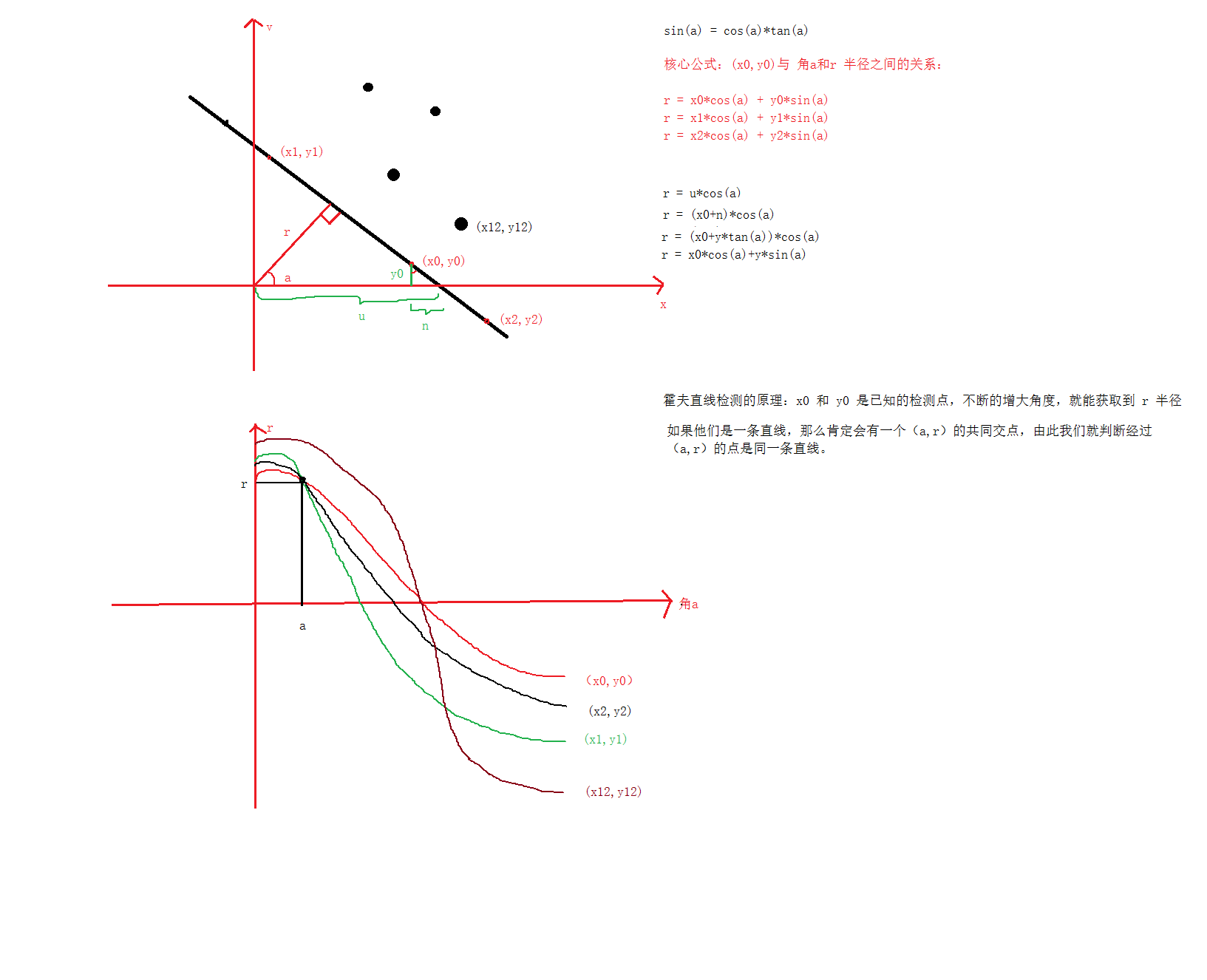
再来看下opencv中的代码
1 | int main(){ |
2. 霍夫圆检测
先来看下原理图: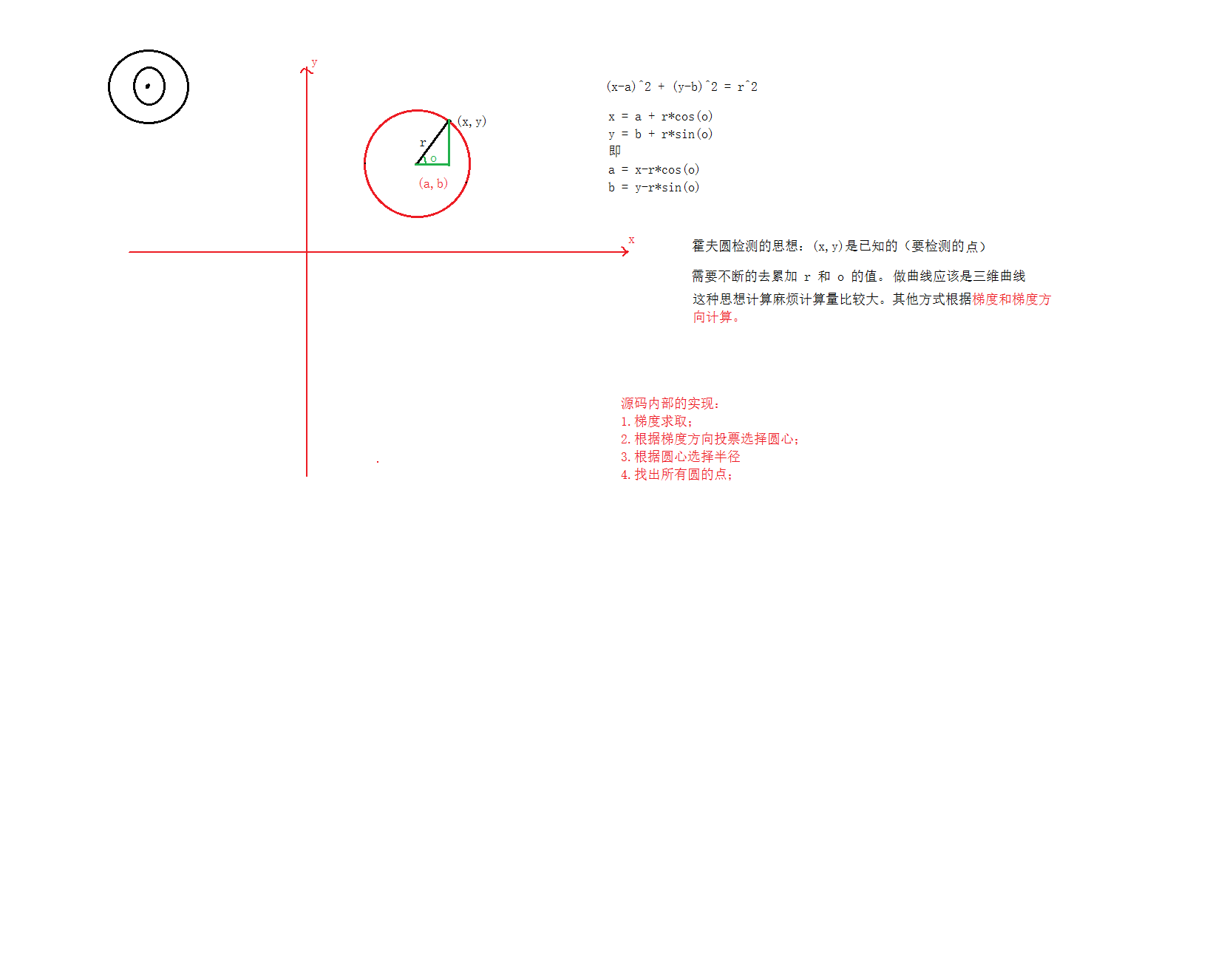
解释:
- 梯度的求取:类似于 x、y 轴的垂直,梯度求取就是
取各个点各个方向直线的垂直线,投票将 相交的次数大于多少的才算作圆
1 | int main(){ |
3.重映射
remap 根据原图按照新定的满足一定规律重新赋值的操作。
g(x,y) = f(h(x,y)) g 新的图片 = h 原图 , f 函数,
可用于镜像翻转
1 | int main(){ |

