1. Sobel 算子 检测图片边缘
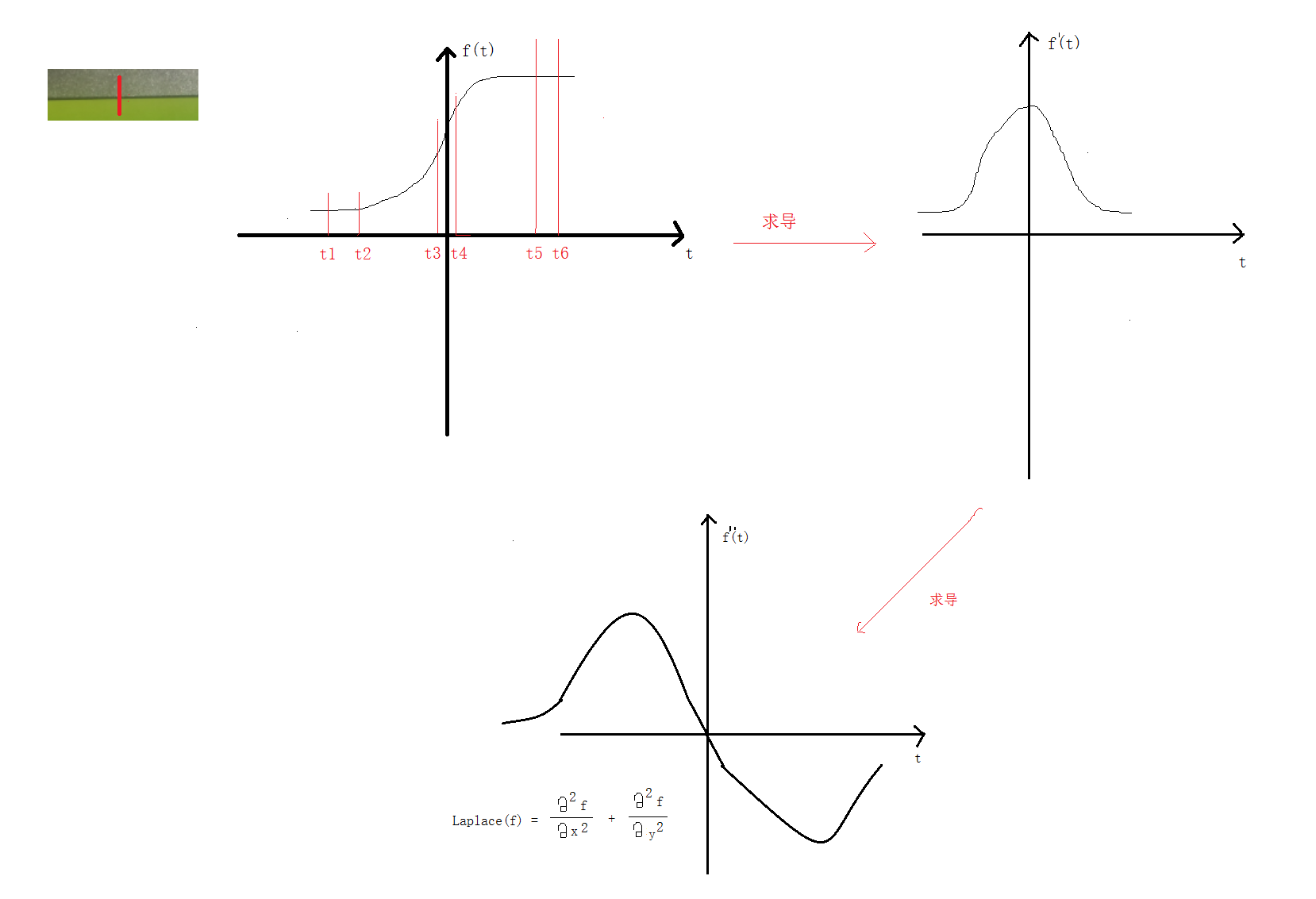
先来看下微积分求导:
上代码:
1 | int main(){ |
sobel x y方向两张图的合并

2. Scharr 增强求边缘
除了求梯度那儿跟 sobel 不一样以外其它代码都类似。下面着重上求梯度的代码
1 | // 3. 求梯度 |
3. Laplance 图片边缘检测
这用到了二阶导数,所以只处理一次图片,不需要像 sobel 那样处理两次图片再合并
1 | int main(){ |
4.Canny 图片边缘检测
1 | int main(){ |
先来看下微积分求导:
上代码:
1 | int main(){ |
sobel x y方向两张图的合并
除了求梯度那儿跟 sobel 不一样以外其它代码都类似。下面着重上求梯度的代码
1 | // 3. 求梯度 |
这用到了二阶导数,所以只处理一次图片,不需要像 sobel 那样处理两次图片再合并
1 | int main(){ |
1 | int main(){ |

