1. 了解下卷积操作
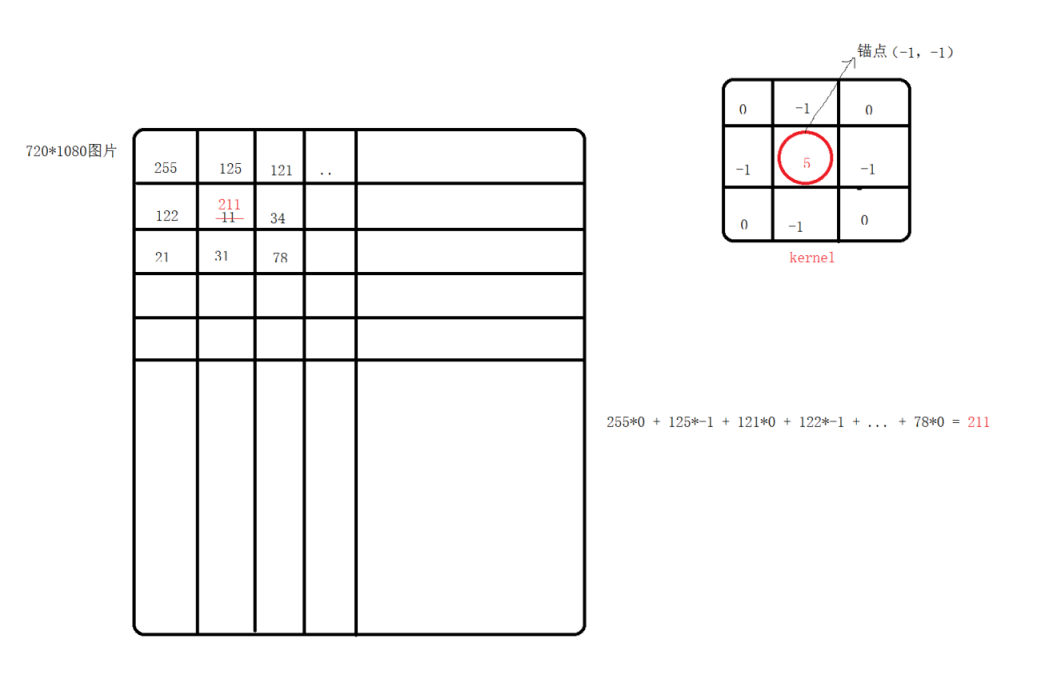
概念:把kernel(卷积核)放到我们图像的矩阵之上,求锚点周围覆盖的像素乘积之和(包括锚点),用来计算锚点的像素值覆盖图片下面的像素值,称之为卷积操作。
2. 处理边缘类型
copyMakeBorder(src,dst,src.rows/8,src.rows/8,src.cols/8,src.cols/8,BORDER_DEFAULT);
- BORDER_DEFAULT:用周边边缘区域来填充
- BORDER_WRAP:用对边来填充
- BORDER_REPLICATE: 用周边像素来填充
- BORDER_CONSTANT: 用一个指定颜色来填充,默认是黑色。
3. 自定义线性滤波与图片模糊(算子也叫作 核)
介绍几种算子
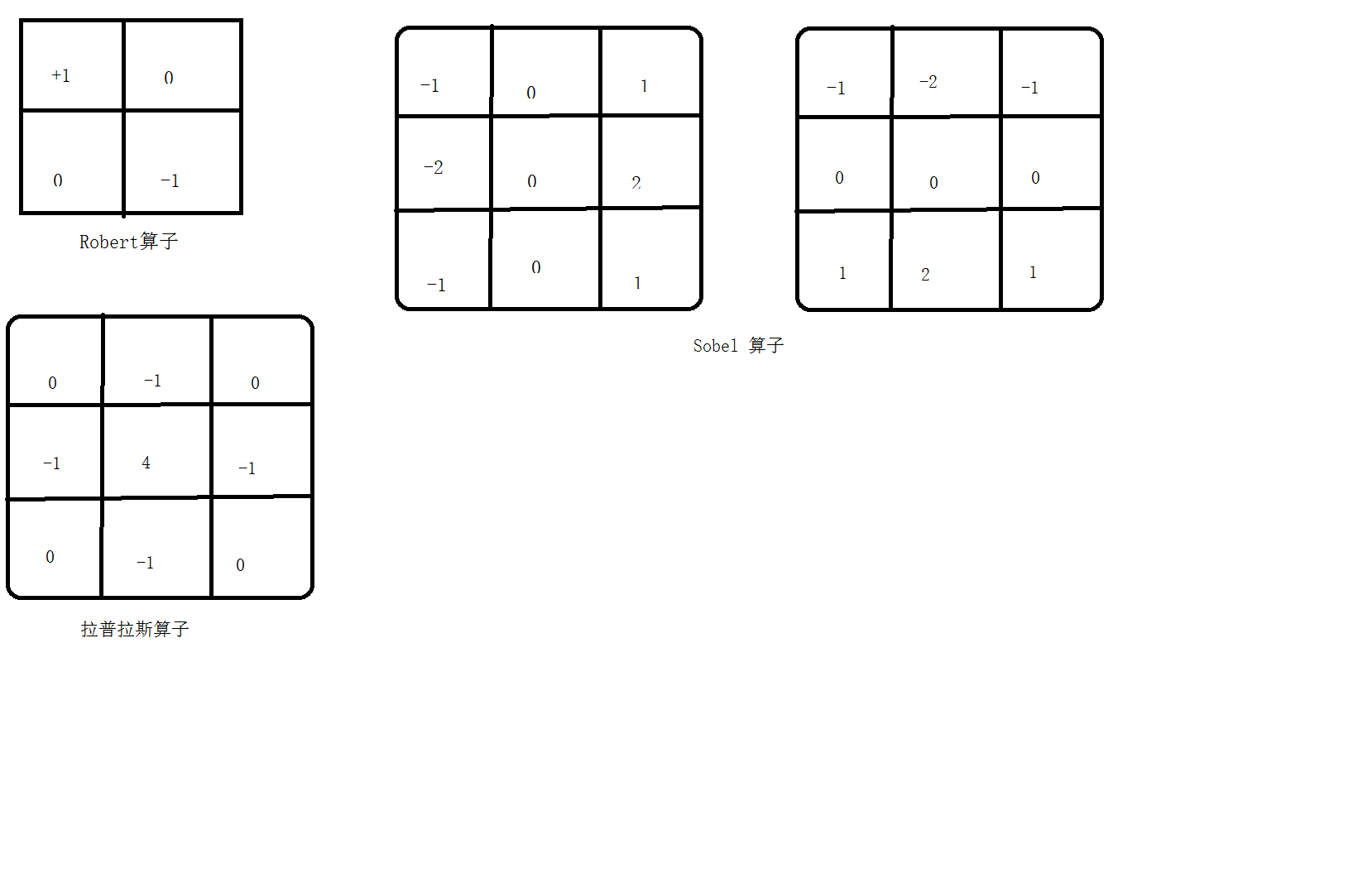
- Robert 算子:
Mat kernelRobert = (Mat_<int>(2, 2) << 1, 0, 0, -1); - Sobel 算子:x方向:
(Mat_<int>(3, 3) << -1, 0, 1, -2,0,2,-1,0,1);,y方向:(Mat_<int>(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1); - 拉普拉斯算子:它对图片的要求比较高
Mat kernelLpls= (Mat_<int>(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
depth:(opencv中的概念)
矩阵中元素的一个通道的数据类型,这个值和type是相关的。例如 type为 CV_16SC2,一个2通道的16位的有符号整数。那么,depth则是CV_16S。depth也是一系列的预定义值,
将type的预定义值去掉通道信息就是depth值: 0 - 6 , type 的精度的层度
CV_8U 0 CV_8S 1 CV_16U 2 CV_16S 3 CV_32S 4 CV_32F 5 CV_64F 6
图像深度:像素的 bit 位数
自定义模糊:
1 | // 自定义模糊 |
4.阈值(图像二值化)
threshold(gray,dst,100,255,type);
当使用了THRESH_OTSU和THRESH_TRIANGLE两个标志时,输入图像必须为单通道。
type 有以下值:
- THRESH_BINARY:当前像素点超过 thresh = 100 ,当前像素取 maxValue = 255 , 否则取最小值 0
- THRESH_BINARY_INV:当前像素点超过 thresh = 100 ,当前像素取 0 , 否则取最大值 maxValue = 255
- THRESH_TRUNC:当前像素点超过 thresh = 100 ,当前像素取 maxValue = 255 , 否则取原来的值
- THRESH_TOZERO:当前像素点超过 thresh = 100 ,当前像素取原来的值,否则取最小值 0
- THRESH_TOZERO_INV:当前像素点超过 thresh = 100,当前像素取 0 ,否则取原来的值
- THRESH_OTSU:自动阈值:取每个像素点(整个图像)计算一个 thresh 值
- THRESH_TRIANGLE:自动阈值:取每个像素点(整个图像)计算一个 thresh 值

